
feature

myvalleysun.com
October 17, 2013
Bullish on the real news in the Monashee
My Valley Sun
blog
index

Online Community News for Lumby, Cherryville, Rural Coldstream and Highway 6
We update this website on a regular basis. We are eager to receive your news, events, advertising and letters by email at: mediaservices@uniserve.com

Translated, the project simply describes that, “Coordinated agile robotic insects can be used for a variety of purposes including: autonomously pollinating a field of crops; search and rescue (e.g., in the aftermath of a natural disaster); hazardous environment exploration; military surveillance; high resolution weather and climate mapping; and traffic monitoring.”
It’s outlined that these are the ubiquitous applications typically invoked in the development of autonomous robots. “We will be mimicking the physical and behavioral robustness of insect groups by coordinating large numbers of small, agile robots, so that we will be able to accomplish such tasks faster, more reliably, and more efficiently.”
It seems almost like a sci-fi movie script until one comes to the most recent set of discoveries which demonstrates that research has made certain breakthroughs.
Called Kilobots, the quarter-sized bug-like devices presently scuttle around on three toothpick-like legs, interacting and coordinating their own behavior as a team. A June 2011 Harvard Technical Report demonstrated a collective of 25 machines implementing swarming behaviors such as foraging, formation control, and synchronization.
Once up and running, the machines are fully autonomous, meaning there is no need for a human to control their actions.
The communicative critters were created by members of the Self-Organizing Systems Research Group led by Radhika Nagpal, the Thomas D. Cabot Associate Professor of Computer Science at the Harvard School of Engineering and Applied Sciences (SEAS) and a Core Faculty Member at the Wyss Institute for Biologically Inspired Engineering at Harvard. Her team also includes Michael Rubenstein, a postdoctoral fellow at SEAS; and Christian Ahler, a fellow of SEAS and the Wyss Institute.
Thanks to a technology licensing deal with the K-Team Corporation, a Swiss manufacturer of high-quality mobile robots; researchers and robotics enthusiasts alike can now take command of their own swarm.
The research team is presently developing sophisticated algorithms that can coordinate the actions of tens to thousands of robots.
coming to a garden near you?
robotic
pollination
If you’re concerned about pesticides or genetically engineered foods, then you will find this story quite disturbing.
In fact it will really bug you.
December 20, 2011
By Don Elzer
It’s a news story that broke late in November and surprisingly it didn’t cause much of a stir, but its one that will no doubt gain some traction as the public feels the sting and begins asking tough questions.
Computer scientists and engineers at Harvard University have developed and licensed technology that will make it easy to test collective algorithms on hundreds, or even thousands, of tiny robots.
"The Kilobot will provide researchers with an important new tool for understanding how to design and build large, distributed, functional systems," says Michael Mitzenmacher, Area Dean for Computer Science at SEAS.
"Plus," he adds, "tiny robots are really cool!"
According to the researchers, the name "Kilobot" does not refer to anything nefarious; rather, it describes the researchers' goal of quickly and inexpensively creating a collective of a thousand bots.
In a report to Science Daily, they say that the research is, “Inspired by nature, such swarms resemble social insects, such as ants and bees, which can efficiently search for and find food sources in large, complex environments; collectively transport large objects; and coordinate the building of nests and other structures.”
Due to reasons of time, cost, and simplicity, the algorithms presently used in research labs are only validated in computer simulation or using a few dozen robots at most. In contrast, the design by Nagpal's team allows a single user to easily oversee the operation of a large Kilobot collective, including programming, powering on, and charging all robots, all of which would be difficult (if not impossible) using existing robotic systems.
So, what can you do with a thousand tiny little bots?
Robot swarms might one day tunnel through rubble to find survivors; monitor the environment and remove contaminants; and self-assemble to form support structures in collapsed buildings. They could also be deployed to autonomously perform construction in dangerous environments; to assist with pollination of crops; or to conduct search and rescue operations.
Project researchers say that for now, the Kilobots are designed to provide scientists with a physical test-bed for advancing the understanding of collective behavior and realizing its potential to deliver solutions for a wide range of challenges.
“Challenges” would be an understatement as bee populations plummet world-wide, and to examine a connection with that particular problem and this research is to examine more closely the Micro Air Vehicles Project itself.
Harvard is one of three lead institutions implementing the research project which received funding from the Wyss Institute and the National Science Foundation - Directorate for Computer and Information Science and Engineering (CISE) also referred to as the Expeditions in Computing program. The project was funded by CISE at levels of up to $2,000,000 per year for five years or in other words $10 million.
So what is the National Science Foundation or NSF?
It’s a United States government agency that supports fundamental research and education in all the non-medical fields of science and engineering. With an annual budget of about $6.87 billion, the NSF funds approximately 20% of all federally supported basic research conducted by colleges and universities in the US. Its biggest claim to fame was its contribution towards establishing the Internet. It has had many other accomplishments but its corporate culture is one of taking on research projects that are much too big for the private sector to manage; so NSF does the heavy lifting and then creates a licensing landscape by which the private sector can expand an industry that utilizes the NSF research and testing.
So if one were to be fearful that bee populations were going to crash, and with them the ability for natural pollination to occur, then large scale research and problem solving might be required.
And this is where it might get complicated. If there was a synthetic solution to pollinate plants would we save the bee?
If a private company owned the means by which pollination occurs, would the bee and any form of natural pollination be competition for that company – and could the act of plant pollination be privately “owned” through patents?
If a country owned the means by which pollination occurred across the planet by way of a coordinated agile insect, would such a country be able to position itself as a dominating power on the planet capable of controlling the global food supply?
These are three important moral questions that we should be asking, particularly in the wake of leaps in genetic engineering.
Some might say that such fears are overstated.
However, a close examination exposes close working relationships between a company such as Monsanto and both Harvard University and the National Science Foundation.
Dr. Robert T. Fraley is Monsanto’s Executive Vice President and Chief Technology Officer and he oversees the company’s world-wide integrated crop and seed agribusiness including applications of technology and research. He is also a technical advisor to the National Science Foundation.
In 1975 Monsanto gave the Harvard Medical School $23 million over twelve years for molecular biology research. The University group handled the basic side of the research while Monsanto was oriented towards goals that the research findings would have within industry. The agreement gave Monsanto the right to the commercial development of any research products designed during the funding period.
It should be no surprise that some of the largest corporations in the US enter into partnerships with institutions like Harvard, as well; one would expect those same corporations to lobby the NSF to anchor research into problems that they themselves find too big to solve.
So if there is a popular assumption that the research landscape contains these relationships then it should only be natural that the checks and balances be in place where the moral questions arising from research can be addressed within a realm of transparent public dialogue.
Research at Harvard had previously made breakthroughs when its Microrobotics Lab conducted the first successful flight of a life-sized robotic fly in 2007. That science is now contributing to this current project which will emulate similar aerobatic robotic feats. In addition, the project team outlines that the autonomous flight that they are presently seeking will be achieved when compact high-energy power sources and associated electronics are integrated seamlessly into the ‘body’ of the machine.
And it appears as though this has been achieved.
This is no longer a sci-fi scenario; it has all the trappings of a revolution in ecological engineering; and public policy makers, environmental activists and the mainstream media have been caught napping.
It’s definitely time for a wake up call.
(30)
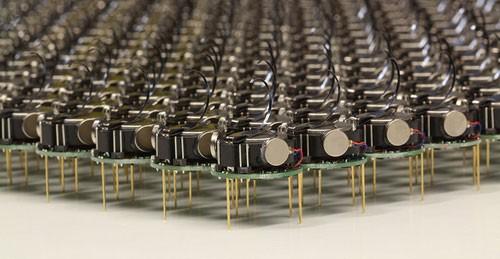
Photo Above: The Kilobots are an inexpensive system for testing synchronized and collaborative behavior in a very large swarm of robots. (Credit: Photo courtesy of Michael Rubenstein.)
ROBO-UPDATE
With a New
Mass-Production
Technique,
Robotic Insects
Spring to Life
February 15, 2012
By Don Elzer
Efforts to create robotic insects is moving forward at a rapid, and even alarming pace. A new technique inspired by elegant pop-up books and origami will soon allow clones of robotic insects to be mass-produced by the sheet. The development is another major step towards the establishment of bio-inspired, bee-sized robots that can fly and behave autonomously as a colony. In December of last year it was called the Micro Air Vehicles Project, now the scientific community is openly calling it the RoboBee Project, now MVS has learned that support for the project is being supplied by the U.S. Army Research Laboratory.
Devised by engineers at Harvard, the ingenious layering and folding process enables the rapid fabrication of not just microrobots, but a broad range of electromechanical devices.
In prototypes, 18 layers of carbon fiber, Kapton (a plastic film), titanium, brass, ceramic, and adhesive sheets have been laminated together in a complex, laser-cut design. The structure incorporates flexible hinges that allow the three-dimensional product -- just 2.4 millimeters tall -- to assemble in one movement, like a pop-up book.
The entire product is approximately the size of a U.S. quarter, and dozens of these microrobots could be fabricated in parallel on a single sheet.
"This takes what is a craft, an artisanal process, and transforms it for automated mass production," says Pratheev Sreetharan (A.B. '06, S.M. '10), who co-developed the technique with J. Peter Whitney. Both are doctoral candidates at the Harvard School of Engineering and Applied Sciences (SEAS).
Sreetharan, Whitney, and their colleagues in the Harvard Microrobotics Laboratory at SEAS have been working for years to build bio-inspired, bee-sized robots that can fly and behave autonomously as a colony. Appropriate materials, hardware, control systems, and fabrication techniques did not exist prior to the RoboBees project, so each must be invented, developed, and integrated by a diverse team of researchers.
Less than a year ago, the group was using a painstaking and error-prone method to fold, align, and secure each of the minuscule parts and joints.
"You'd take a very fine tungsten wire and dip it in a little bit of superglue," explains Sreetharan. "Then, with that tiny ball of glue, you'd go in under a microscope like an arthroscopic surgeon and try to stick it in the right place."
"Until recently, the manual assembly process was the state of the art in this field," Sreetharan adds.
By the numbers
- Folding joints: 22
- Assembly scaffold folding joints: 115
- Total device folding joints: 137
- Number of brass pads for "glue" points: 52
- Total number of "glue" points: 24
- Mass: 90 mg
By mass, one U.S. quarter = 63 Harvard Monolithic Bees
The same result can now be achieved -- without human error -- through locking mechanisms and dip soldering. The new process also enables the use of cured carbon fiber, which is rigid and easy to align, rather than uncured carbon fiber, which Sreetharan compares to "wet tissue paper."
"Our new techniques allow us to use any material including polymers, metals, ceramics, and composites," says principal investigator Rob Wood, an Associate Professor of Electrical Engineering at SEAS and a Core Faculty Member at the Wyss Institute for Biologically Inspired Engineering at Harvard.
"The ability to incorporate any type and number of material layers, along with integrated electronics, means that we can generate full systems in any three-dimensional shape," Wood says. "We've also demonstrated that we can create self-assembling devices by including pre-stressed materials."
The implications of this novel fabrication strategy go far beyond these micro-air vehicles. The same mass-production technique could be used for high-power switching, optical systems, and other tightly integrated electromechanical devices that have parts on the scale of micrometers to centimeters.
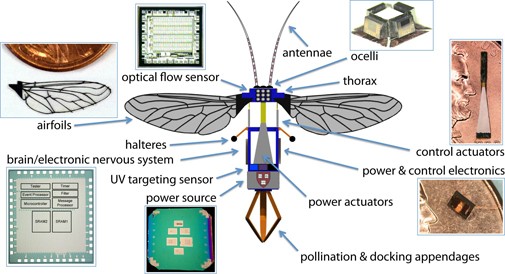
Called the Micro Air Vehicles Project, the university says it was inspired by the biology of a bee and the insect’s hive behavior.
The project openly describes a vision of a coordinated agile insect and states, “We aim to push advances in miniature robotics and the design of compact high-energy power sources; spur innovations in ultra-low-power computing and electronic “smart” sensors; and refine coordination algorithms to manage multiple, independent machines.”
Moreover, the layering process builds on the manufacturing process currently used to make printed circuit boards, which means that the tools for creating large sheets of pop-up devices are common and abundant. It also means that the integration of electrical components is a natural extension of the fabrication process -- particularly important for the size- and weight-constrained RoboBees project.
"In a larger device, you can take a robot leg, for example, open it up, and just bolt in circuit boards. We're so small that we don't get to do that. I can't put a structural mechanism in here and have it serve no electrical function."
Pointing to the carbon-fiber box truss that constitutes the pop-up bee's body frame, Sreetharan says, "Now, I can put chips all over that. I can build in sensors and control actuators."
Essentially, tiny robots can now be built by slightly bigger robots. Designing how all of the layers will fit together and fold, however, is still a very human task, requiring creativity and expertise. Standard computer-aided design (CAD) tools, typically intended for either flat, layered circuit boards or 3D objects, do not yet support devices that combine both.
Once the design is complete, though, fabrication can be fully automated, with accuracy and precision limited only by the machining tools and materials.
"The alignment is now better than we can currently measure," says Sreetharan. "I've verified it to better than 5 microns everywhere, and we've gone from a 15% yield to -- well, I don't think I've ever had a failure."
The full fabrication process will be described in the March issue of the Journal of Micromechanics and Microengineering. Co-authors and collaborators, beside Whitney, Sreetharan, and Wood, include Kevin Ma, a graduate student at SEAS; and Marc Strauss, a research assistant in Wood's lab.
The work was supported by the U.S. Army Research Laboratory, the National Science Foundation (through the Expeditions in Computing program), and the Wyss Institute.
Story Source:
The above story is reprinted from materials provided by Harvard University.
Note: Materials may be edited for content and length. For further information, please contact the source cited above.
Journal Reference:
J P Whitney, P S Sreetharan, K Y Ma, R J Wood. Pop-up book MEMS. Journal of Micromechanics and Microengineering, 2011; 21 (11): 115021 DOI
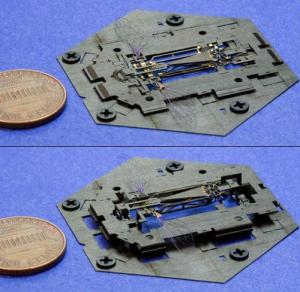
Photo: The Harvard Monolithic Bee (or "Mobee") pops up within an assembly scaffold, which performs more than 20 origami assembly folds. (Credit: Photos courtesy of Pratheev Sreetharan.)